
































BESCHREIBUNGEinfachheit, schnelle Installation und effiziente Leistung.
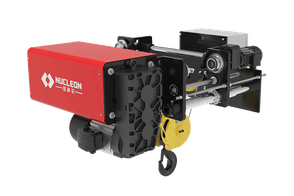
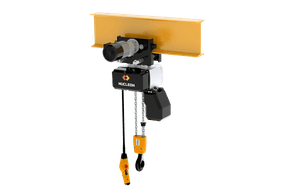
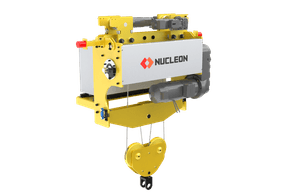
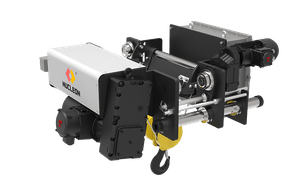
Der Hebemechanismus des Einträger-Portalkrans ist modular und parametrisch aufgebaut. Der Hebemechanismus besteht aus einem herkömmlichen elektrischen Seilzug mit stabiler Leistung, Haltbarkeit, Sicherheit und Zuverlässigkeit. Der Fahrmechanismus der Laufkatze wird durch eine vertikale Geschwindigkeitsänderung oder ein Drei-in-Eins-Antriebsgerät angetrieben, und zur Steuerung wird das übliche Geschwindigkeitskontrollsystem verwendet.
Die gesamte Maschine zeichnet sich durch geringes Gewicht, einfache Struktur, bequeme Installation und Wartung usw. aus. Sie eignet sich für allgemeine Be- und Entlade- und Hebearbeiten mit kleiner und mittlerer Tragfähigkeit in Fabriken, Bergwerken, Höfen, Lagerhallen und anderen Außenbereichen.
- Je nach Auslegertyp können Kräne in Krane ohne Ausleger, Krane mit Einzelausleger und Krane mit Doppelausleger unterteilt werden.
- Je nach Strukturform kann die Stahlkonstruktion in Kastentyp, Fachwerktyp und oberen Kasten- und unteren Rahmentyp unterteilt werden.
- Je nach Betriebsart kann zwischen Bodenbetrieb, Luftbetrieb und Fernsteuerungsbetrieb unterschieden werden.










Nullgeschwindigkeitsschwebeflug
Stellen Sie sicher, dass sich der Kran langsam und präzise bewegt, wenn er sich seinem Ziel nähert.

Elektrische Anti-Schlinger-Funktion
Kann das Schwanken des Laders während der Handhabung automatisch begrenzen, was zu schnellerer Handhabung und genauerer Positionierung führt.

Multi-Hook-Koordination
Überwachen und steuern Sie den Positionsunterschied mehrerer Haken, um sicherzustellen, dass die Haken synchron mit der gleichen Geschwindigkeit laufen.

Schneckentempo
Die Dead-Slow-Funktion kann die Stabilität des Steuerungssystems und eine langsame, präzise Bewegung beim Bewegen und Beladen des Krans gewährleisten.

Synchronisierung mehrerer Trolleys
Positionsunterschiede mehrerer Krane können überwacht und gesteuert werden, um sicherzustellen, dass der Kranantrieb synchron mit der gleichen Geschwindigkeit läuft.

Geschwindigkeitserweiterungsfunktion
Unsere Kräne können mit Ausnahme der niedrigen und hohen Geschwindigkeit eine Sub-Low-Speed- und Sub-High-Speed-Funktionsregelung hinzufügen, was praktisch und effizient ist.
PROJEKTREFERENZEN
Nachgewiesene Erfolgsbilanz: Über 100.000 Krane sprechen für unser Wissen und unsere Zuverlässigkeit
LD 5t Einträger-Laufkrane
- Anwendungen: Fertigungsindustrie
- Produkt: Einträger-Laufkrane
- Vorteile: Leichtbauweise, Leichtbauweise


