
































PAGLALARAWANMatatag na istraktura, compact at mataas na pagsasama.
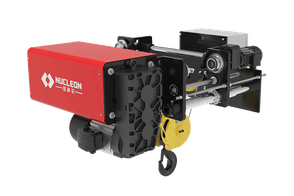
Ang truss gantry crane ay gumagamit ng magaan, modular na disenyo. Ang mekanismo ng pag-angat ng gantry beam hoister ay gumagamit ng windlass crab na may mabagal na bilis ng pag-angat, compact na istraktura at mataas na pagsasama.
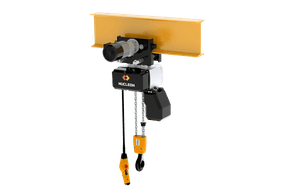
Ang mekanismo ng paglalakbay ng troli ay hinihimok ng three-in-one na drive device at ang control mechanism ay gumagamit ng advanced variable frequency at speed regulation control system; Ang mekanismo ng pag-aangat ng hoist gantry crane para sa accessory hoisting ay gumagamit ng CD1 / MD1 electric hoist na may simpleng istraktura, matatag na pagganap at matibay na pagganap. Ang mekanismo ng paglalakbay ng troli ay hinihimok ng patayong aparato sa pagmamaneho, at ang mekanismo ng kontrol ay gumagamit ng isa o maramihang mga kontrol ng linkage.
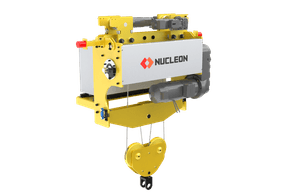
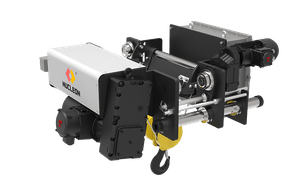
Ang engineering gantry crane ay gumagamit ng double-beam at double-rail structure, at ang pangunahing beam ay isang triangular truss structure, na gawa sa mga seksyon; Ang matibay na binti ay isang baligtad na tatsulok na istraktura na hinangin ng mga tubo ng bakal, ang nababaluktot na binti ay isang solong bakal na tubo, at ang lahat ng mga pantulong na sumusuporta sa mga rod ay konektado sa pamamagitan ng mga pin. Ang single main beam truss structure ay pinagtibay para sa hoist gantry crane para sa accessory hoisting. Ang pangunahing sinag ay isang regular na istraktura ng tatsulok at ang mga binti ay baligtad na trapezoidal na istraktura na hinangin ng profile na bakal.
MGA TAMPOK NG PRODUKTOSimpleng istraktura, matatag na pagganap at matibay na pagganap
- Matatag na istraktura at mahusay na pagganap.
- Simpleng operasyon at maginhawang paggamit.
- Ligtas at maaasahan, madaling i-disassemble.







Zero Speed Hover
Tiyakin na ang kreyn ay gumagalaw nang mabagal at tumpak habang papalapit ito sa destinasyon nito.

Electric Anti-sway Function
Maaaring awtomatikong limitahan ang sway ng loader sa proseso ng paghawak, mas mabilis na paghawak at mas tumpak na pagpoposisyon.

Multi-hook Coordination
Subaybayan at kontrolin ang pagkakaiba sa posisyon ng maraming kawit para magkasabay na tumakbo ang mga kawit sa parehong bilis.

Sobrang bagal
Matitiyak ng dead slow function ang katatagan ng control system at mabagal, tumpak na paggalaw kapag gumagalaw at naglo-load ang kreyn.

Multi-trolley Synchronization
Ang pagkakaiba sa posisyon ng maramihang mga crane ay maaaring masubaybayan at makontrol upang gawin ang mekanismo ng pagpapatakbo ng crane nang sabay-sabay sa parehong bilis.

Function ng Speed Expansion
Ang aming mga crane ay maaaring magdagdag ng sub-low speed at sub-high speed function na regulasyon maliban sa mababang bilis at mataas na bilis, na praktikal at mahusay.
MGA SANGGUNIAN NG PROYEKTO
Napatunayang Track Record: 100,000+ Crane ang Nagsasalita Sa Aming Kaalaman At Pagkakaaasahan
LD 5t Single Girder EOT Cranes
- Mga Aplikasyon: Industriya ng Paggawa
- Produkto: Single Girder EOT Cranes
- Mga Bentahe: Magaan na Constructio, Magaang Constructio


