
































विवरणमानक मॉड्यूलर डिज़ाइन, कॉम्पैक्ट संरचना
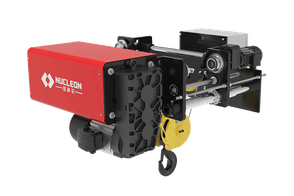
हेवी ड्यूटी ओवरहेड क्रेन हल्के, मॉड्यूलर और पैरामीट्रिक डिजाइन को अपनाती है। उत्थापन तंत्र उच्च एकीकरण के साथ नए चीनी विंडलैस केकड़े का उपयोग करता है। ट्रॉली और केकड़े के यात्रा तंत्र को थ्री-इन-वन ड्राइव डिवाइस द्वारा चलाया जाता है और नियंत्रण तंत्र उन्नत चर आवृत्ति और गति विनियमन नियंत्रण प्रणाली को अपनाता है।
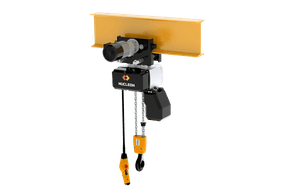
हुक के साथ नए प्रकार की ओवरहेड क्रेन क्रमबद्धता, मानकीकरण और मॉड्यूलरीकरण के डिजाइन दर्शन को अपनाती है। आधुनिक कंप्यूटर प्रौद्योगिकी का उपयोग करना और उन्नत प्रौद्योगिकी का परिचय देना, एक प्रकार की क्रेन का निर्माण करना जो उद्योग के विकास के अनुकूल हो।
उत्पाद की विशेषताएँहल्का डेडवेट, छोटा पहिया दबाव, प्रभावी रूप से संयंत्र लागत को बचाता है
- हल्का डेडवेट, छोटा पहिया दबाव, कम क्लीयरेंस, प्रभावी रूप से संयंत्र लागत की बचत
- हुक की छोटी सीमा, बड़ा कार्य क्षेत्र, विस्तृत कवरेज रेंज
- कम ट्रांसमिशन लिंक, उच्च ट्रांसमिशन दक्षता, कम विफलता बिंदु
- उच्च गुणवत्ता वाले हिस्से, छोटा रखरखाव, लंबी सेवा जीवन
- संपूर्ण क्रेन का आवृत्ति नियंत्रण, स्थिर ब्रेकिंग, सुरक्षित और उपयोग में सुविधाजनक
- पूरे क्रेन की शक्ति छोटी है, जो प्रभावी रूप से विद्युत ऊर्जा संसाधन को बचाती है
- बहु-चयन का समर्थन करें: हुक का एंटी-स्वे, डबल ब्रेकिंग आदि
उत्पाद लाभउन्नत निर्मित प्रौद्योगिकी
- स्टील प्लेट के लिए सैंडब्लास्टिंग प्रीट्रीटमेंट, इसकी सतह की गुणवत्ता Sa2.5 तक पहुंच सकती है।
- वेब प्लेट को काटने के लिए डिजिटल कटिंग मशीन का उपयोग करके, कैमर कर्विलीनियर की चिकनी और परिशुद्धता सुनिश्चित करें।
- मुख्य वेल्डिंग सीम ऑटो आर्क मर्ज्ड वेल्डिंग, अल्ट्रासोनिक, एक्स रे नॉनडिस्ट्रक्टिव निरीक्षण को अपनाता है।
- पुल और ट्रॉली फ्रेम मशीन के किनारे की समतलता सुनिश्चित करने के लिए फर्श प्रकार की बोरिंग मशीन को अपनाता है।













जीरो स्पीड होवर
सुनिश्चित करें कि क्रेन अपने गंतव्य तक पहुंचते समय धीरे और सटीक रूप से चले।

इलेक्ट्रिक एंटी-स्वे फ़ंक्शन
हैंडलिंग, तेज़ हैंडलिंग और अधिक सटीक स्थिति की प्रक्रिया में लोडर के बोलबाला को स्वचालित रूप से सीमित कर सकता है।

मल्टी-हुक समन्वय
हुकों को एक ही गति से समकालिक रूप से चलाने के लिए कई हुकों की स्थिति में अंतर की निगरानी और नियंत्रण करें।

बहुत धीमी
डेड स्लो फ़ंक्शन नियंत्रण प्रणाली की स्थिरता और क्रेन के चलने और लोड होने पर धीमी, सटीक गति सुनिश्चित कर सकता है।

मल्टी-ट्रॉली सिंक्रोनाइज़ेशन
क्रेन ऑपरेटिंग तंत्र को एक ही गति से समकालिक रूप से चलाने के लिए कई क्रेनों की स्थिति के अंतर की निगरानी और नियंत्रण किया जा सकता है।

गति विस्तार समारोह
हमारी क्रेनें कम गति और उच्च गति को छोड़कर उप-निम्न गति और उप-उच्च गति फ़ंक्शन विनियमन जोड़ सकती हैं, जो व्यावहारिक और कुशल है।
परियोजना संदर्भ
सिद्ध ट्रैक रिकॉर्ड: 100,000+ क्रेनें हमारे ज्ञान और विश्वसनीयता को बयां करती हैं
एलडी 5टी सिंगल गर्डर ईओटी क्रेन
- अनुप्रयोग: विनिर्माण उद्योग
- उत्पाद: सिंगल गर्डर ईओटी क्रेन
- लाभ: लाइटवेट कंस्ट्रक्टियो, लाइटवेट कंस्ट्रक्टियो


