
































OPISLekka, modułowa i parametryczna konstrukcja
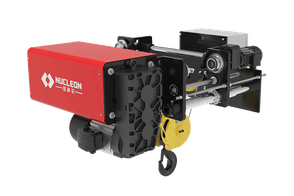
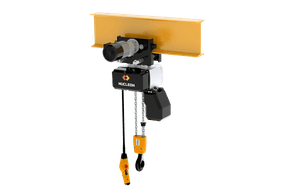
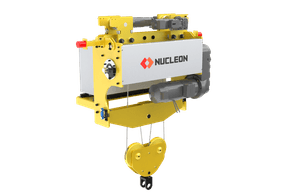
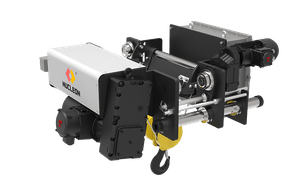
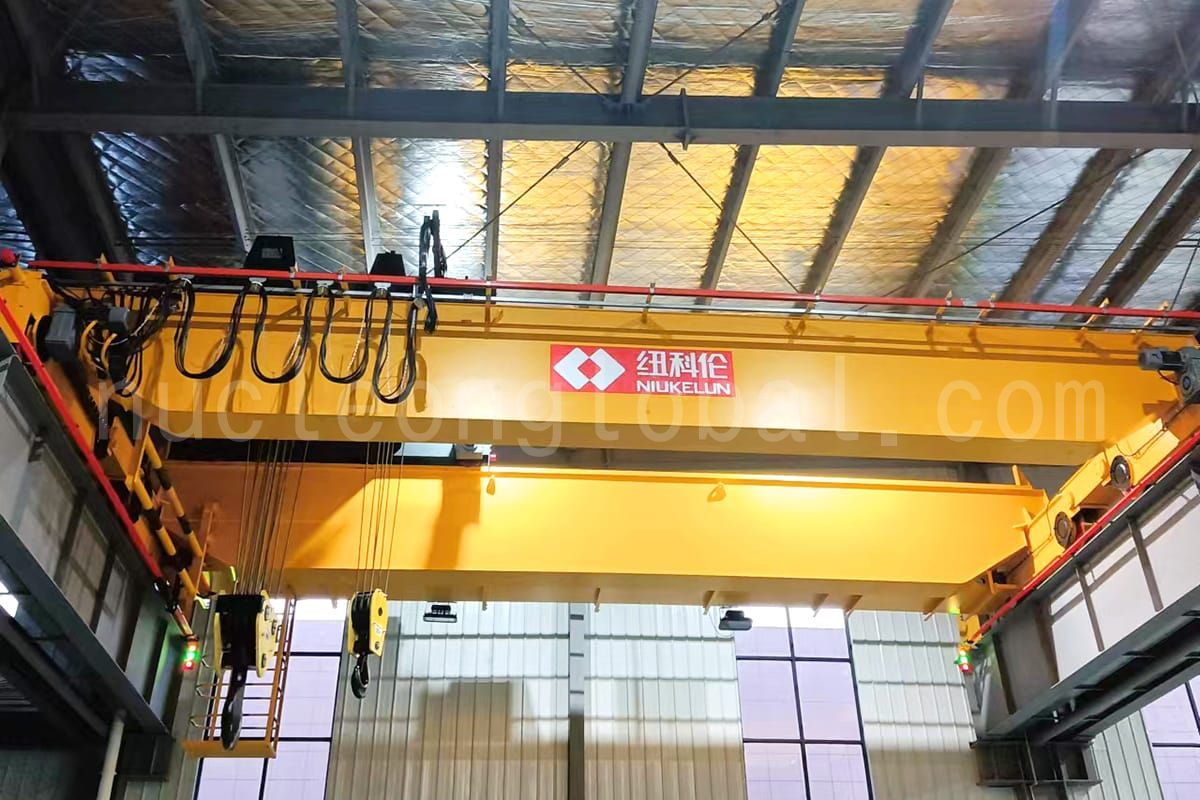
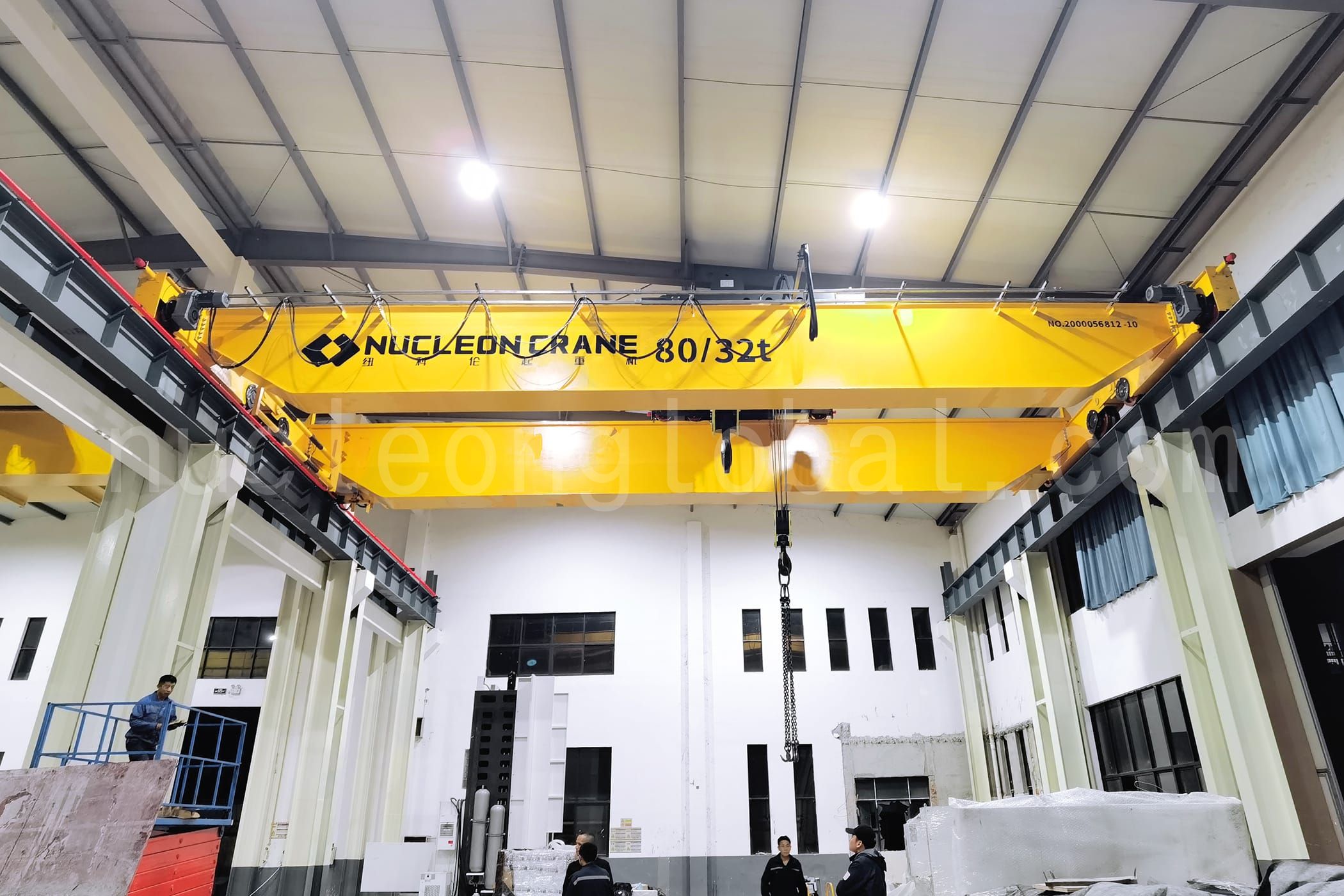
Suwnice pomostowe dwudźwigarowe charakteryzują się lekką, modułową i parametryczną konstrukcją. Mechanizm podnoszący wykorzystuje wciągnik elektryczny typu krab NRT o doskonałej wydajności i zaawansowanej technologii. Mechanizm jezdny wózka napędzany jest przez urządzenie napędowe „trzy w jednym”, a mechanizm sterujący wykorzystuje zaawansowany system sterowania regulacją zmiennej częstotliwości i prędkości.
Rama krabowa żurawia ma konstrukcję w kształcie litery „H” składającą się z jednej lub dwóch belek poprzecznych i dwóch belek wzdłużnych. Belkę poprzeczną suwnicy małotonażowej umieszcza się pośrodku rozpiętości belki na obu końcach, jedna strona jest sztywno połączona z belką końcową, a druga strona jest przegubowo z belką końcową. Taka konstrukcja nie tylko zapewnia kontakt koła krabowego z gąsienicą w każdych warunkach pracy, ale także zmniejsza wymagania dotyczące dokładności produkcyjnej ramy kraba.
Robocza temperatura otoczenia wynosi zazwyczaj -25 stopni ~ 40 stopni. Zabrania się jednak pracy w środowisku palnym, wybuchowym lub żrącym.
CECHY PRODUKTULekka i modułowa konstrukcja
- Zwarta konstrukcja i niewielki limit rozmiarów.
- Regulacja prędkości ze zmienną częstotliwością i stabilna praca.
- Kompletne, bezpieczne i niezawodne urządzenie zabezpieczające.
- Zintegrowana skrzynia biegów, oszczędność energii i wysoka wydajność.
- Cichy napęd, niski poziom hałasu i ochrona środowiska.
Zalety produktuNiskoenergetyczny i bezobsługowy
Niskoenergetyczny i bezobsługowy
- Całkowita moc dźwigu zmniejsza się o około 30%, oszczędzanie energii i ochrona środowiska.
- Zintegrowany mechanizm przekładniowy typu „wiele w jednym” charakteryzuje się mniejszą liczbą węzłów pierścienia pośredniego i wysoką wydajnością przekładni.
- Zastosuj kontrolę częstotliwości, wysoki i niski współczynnik prędkości 1:10, wydajność pracy wzrosła o ponad 20%.
- Koncepcja konstrukcyjna „Bezobsługowa i łatwa konserwacja” zmniejsza koszty konserwacji ponoszone przez klienta.
- Wykorzystuje zaawansowaną technologię przetwarzania i wysokiej jakości importowane komponenty. Jego awaryjność została znacznie zmniejszona w porównaniu z tradycyjnym żurawiem GB, co pomaga klientom obniżyć koszty operacyjne.
Inteligentnie
- W dźwigu można zainstalować wiodącą na świecie technologię elektrycznej stabilizacji toru jazdy, która pozwoli na precyzyjne pozycjonowanie.
- Zaawansowana technologia sterowania elektrycznego może osiągnąć półautomatyczne i automatyczne podnoszenie sterujące, dzięki czemu dźwig staje się „robotem podnoszącym”.









Unoszenie się z zerową prędkością
Upewnij się, że dźwig porusza się powoli i dokładnie, zbliżając się do miejsca docelowego.

Elektryczna funkcja zapobiegająca kołysaniu
Może automatycznie ograniczyć kołysanie się ładowarki w procesie obsługi, szybszą obsługę i dokładniejsze pozycjonowanie.

Koordynacja wielu haków
Monitoruj i kontroluj różnicę pozycji wielu haków, aby haki działały synchronicznie z tą samą prędkością.

Jechać powoli w napisie
Funkcja Dead Slow może zapewnić stabilność systemu sterowania oraz powolny, dokładny ruch, gdy dźwig porusza się i ładuje.

Synchronizacja wielu wózków
Można monitorować i kontrolować różnicę pozycji wielu dźwigów, aby mechanizm operacyjny dźwigu działał synchronicznie z tą samą prędkością.

Funkcja zwiększania prędkości
Nasze żurawie mogą dodać funkcję regulacji niskiej i niskiej prędkości, z wyjątkiem niskiej i dużej prędkości, co jest praktyczne i wydajne.
REFERENCJE PROJEKTÓW
Udokumentowane osiągnięcia: ponad 100 000 żurawi potwierdza naszą wiedzę i niezawodność
Żurawie jednodźwigarowe EOT LD 5t
- Zastosowania: Przemysł produkcyjny
- Produkt: Żurawie jednodźwigarowe EOT
- Zalety: Lekka konstrukcja, Lekka konstrukcja


